
Tinymovr R5.3
Tinymovr R5.3
Order 10 or more items and get 5% off
Couldn't load pickup availability
Preorder R5.3 now to lock in current pricing. Ships January 2026.
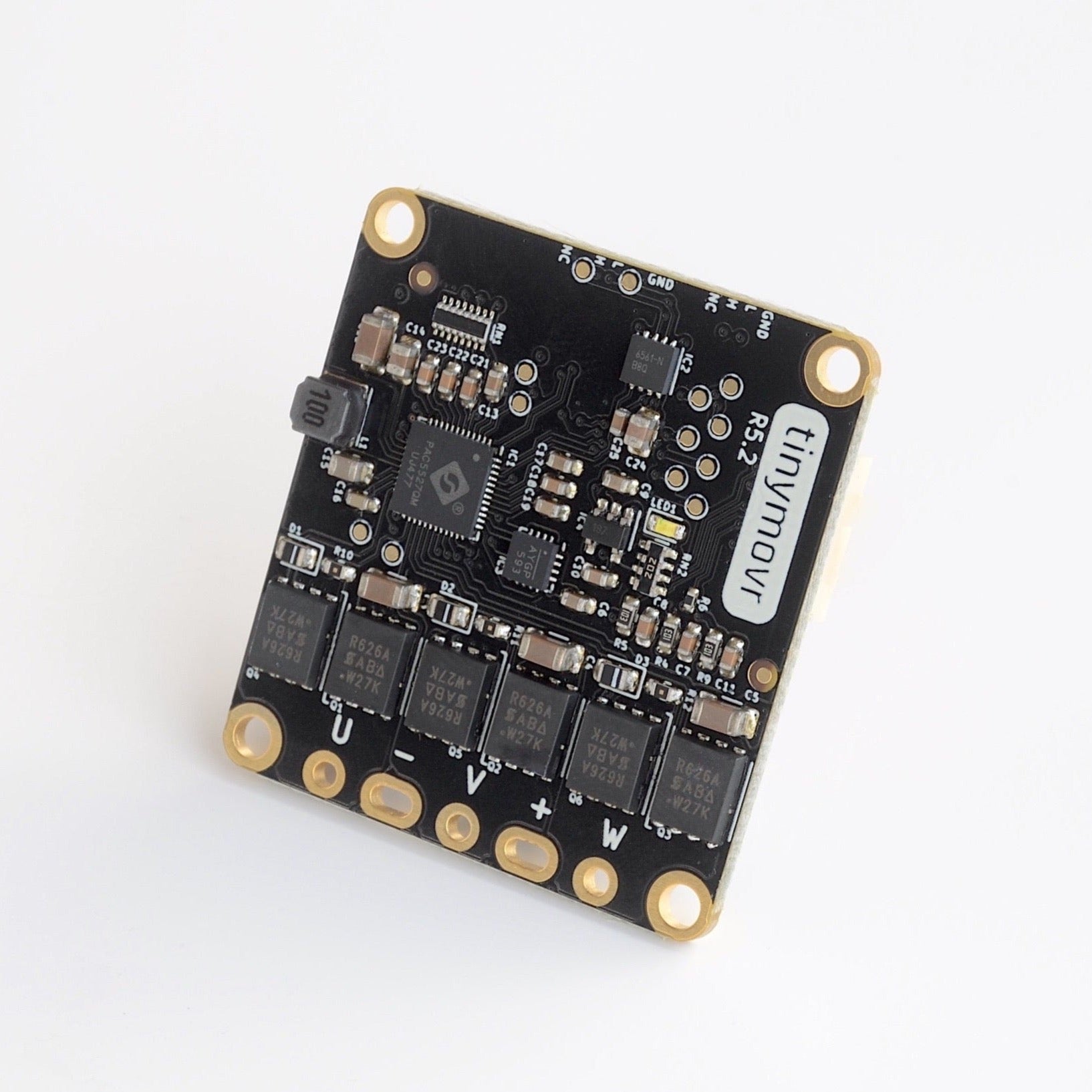
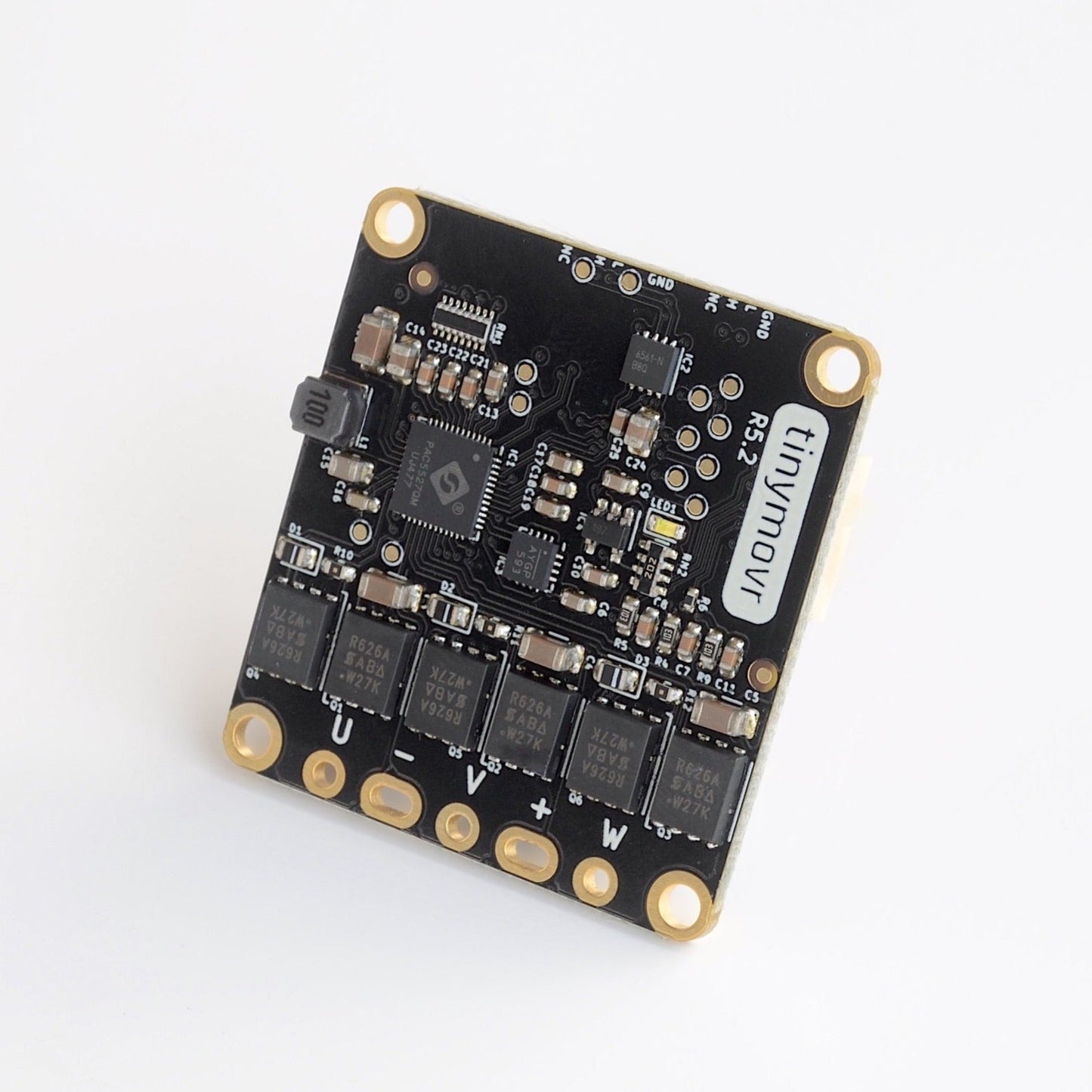
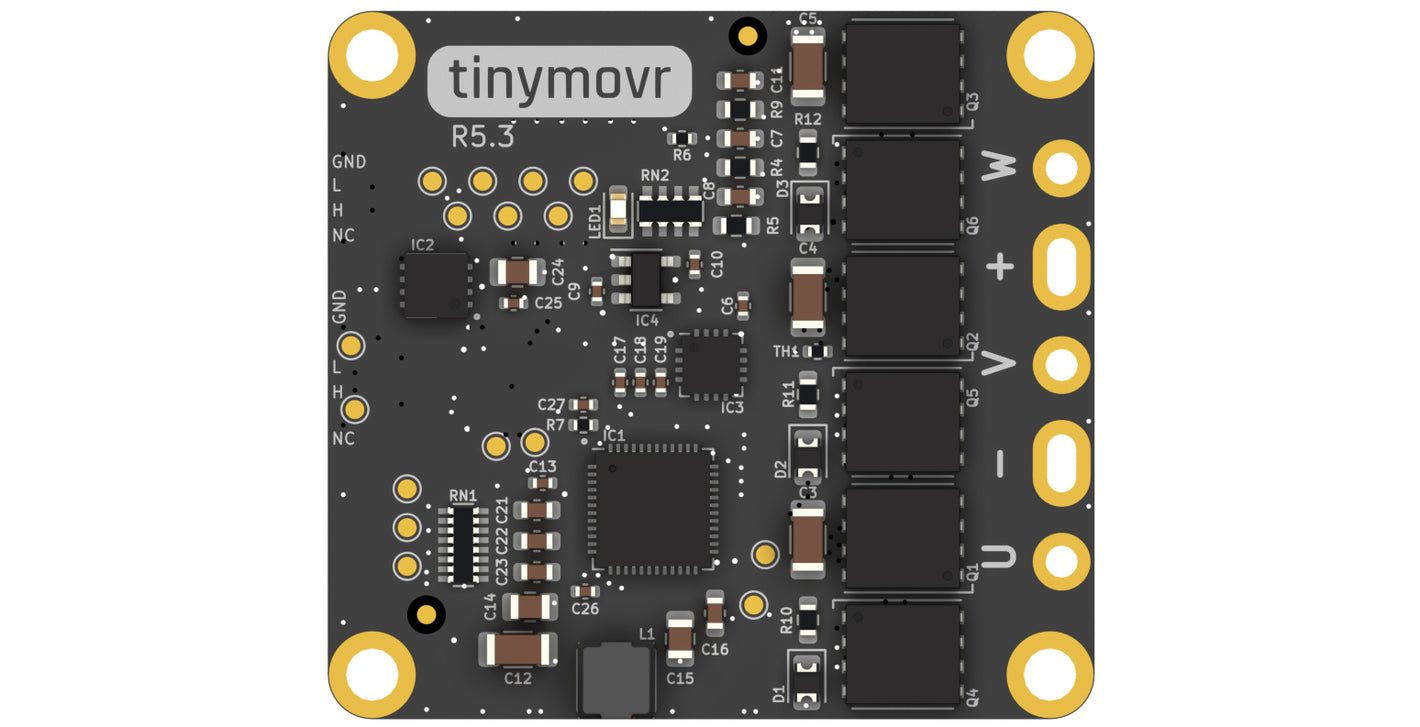
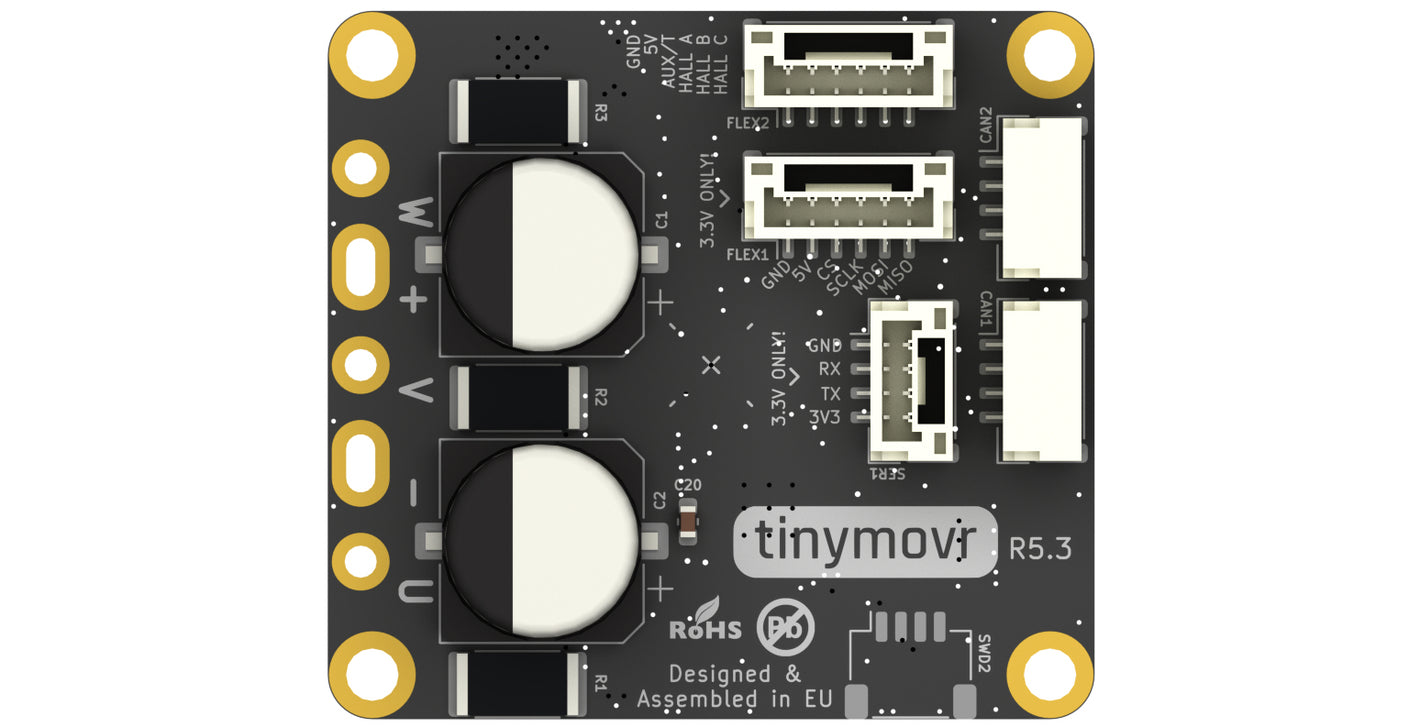
Tinymovr R5.3 is a compact and powerful brushless motor controller with integrated absolute angle sensor. Featuring a 32-bit ARM Cortex M4F (Qorvo PAC5527), an absolute magnetic angle sensor, and 25A maximum continuous phase current, it offers precision operation in position, velocity and torque modes using Field Oriented Control (FOC). It supports CAN, UART and Hall sensor connectivity. Its compact size allows for seamless integration at the back of the brushless motor.
![]()

Specs Summary
Specs Summary
Input voltage range: 12.0–38.0V
Max Phase Current: 25.0 A
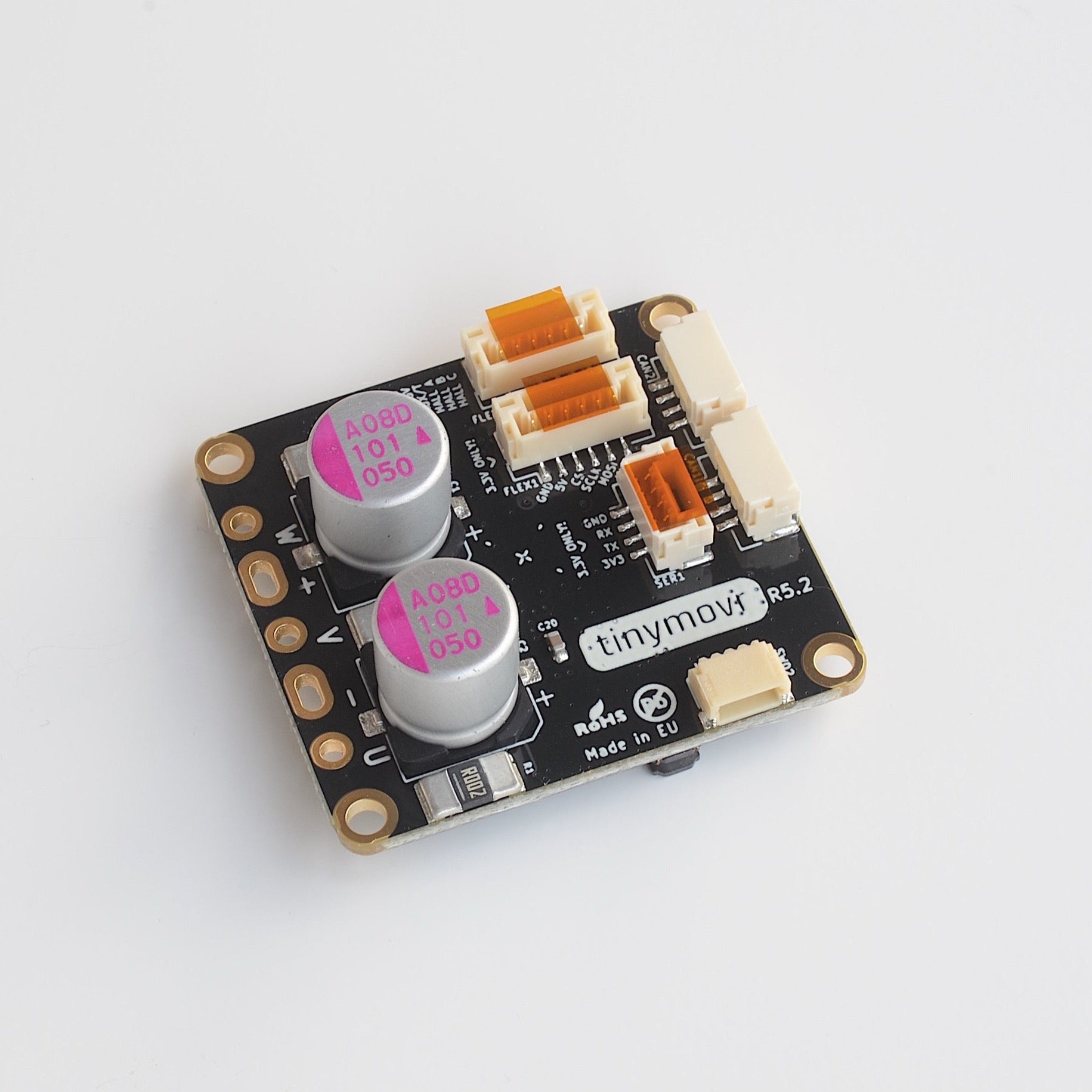
Connectivity: CAN (2x), UART, SPI, and AUX/Hall Sensor
PCB Dimensions: x
Weight:
In the box
In the box
Tinymovr R5
Diametrically Magnetized NdFeB magnet
Essential accessories
Essential accessories
Features
-

FOC Control Core
-
Torque, Velocity, Position and Trajectory Control Modes
-
Onboard High Resolution Absolute Angle Sensor
-
Compact 36 mmx40 mm Footprint
-
Efficiency & Regenerative Operation
-
External SPI and Hall Effect Sensor Support
-
Automatic Calibration
-
Open Source Firmware
-

GUI App, C++, Python, ROS & Arduino Libraries









Specs
-
• Input Voltage: 12.0–38.0V
• Max Continuous Phase Current (depending on cooling): 25.0 A
• Compatible Motor Internal Resistance: 0.01Ω - 1.00Ω
• Compatible Motor Internal Inductance: 5μH - 1mH
-
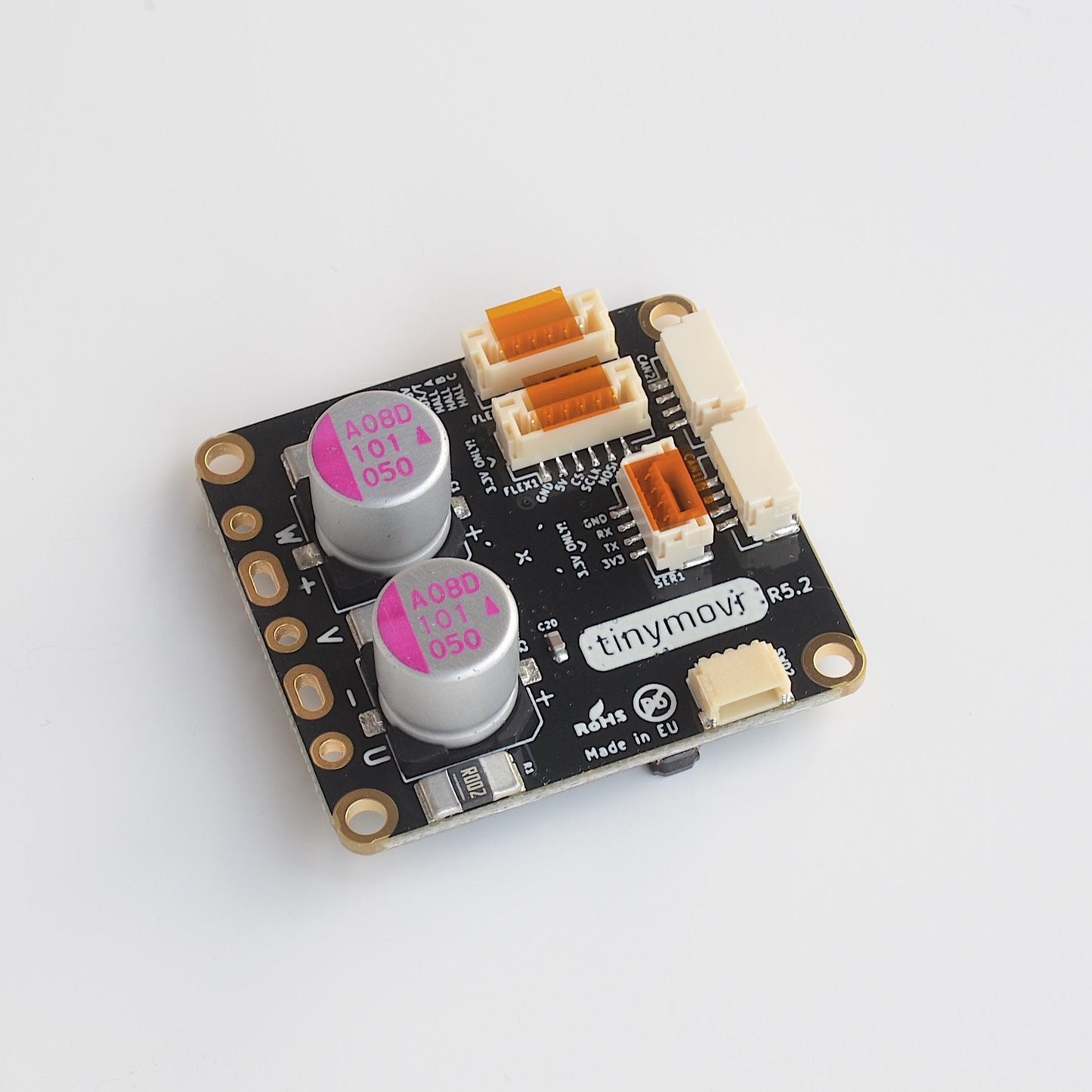
• CAN Bus interface 1Mbps with 2x JST-GH 4-pin sockets for daisy-chaining
• UART interface with JST-GH 4-pin socket
• SPI interface with JST-GH 6-pin socket
• SWD interface with JST-SH 4-pin socket
• Idle power 0.5W
-
• Dimensions: x
• Weight:
• Included diametrically magnetized NdFeB grade N35 cylinder (6mm DIA X 2.5mm H / 0.236"DIA X 0.098"H; datasheet here).
• Fully End-of-Line tested
• 🇪🇺Designed & Manufactured in EU
Tinymovr Accessories
-
CANine USB-C to CAN Adapter
Regular price From €39,50 EURRegular priceUnit price per -
Tinymovr R Series Wire Pack
Regular price From €4,50 EURRegular priceUnit price per€4,20 EURSale price From €4,50 EUR -
Diametrically Magnetized Magnet
Regular price €1,19 EURRegular priceUnit price per


Integrations
-
Python
Install packageTinymovr Studio is a high-level command line interface and Python library for rapid prototyping with Tinymovr
-

Arduino
Browse the repoArduino-compatible C++ library for controlling one or more Tinymovrs through CAN Bus
-

ROS + ROS2
Browse the repoROS, and ROS2-compatible Hardware Interface for controlling multiple Tinymovr instances. Differential Bot demo included!


