



Axion R1 Actuator
Axion R1 Actuator
Order 10 or more items and get 5% off
Couldn't load pickup availability
Note: Available stock is used engineering samples
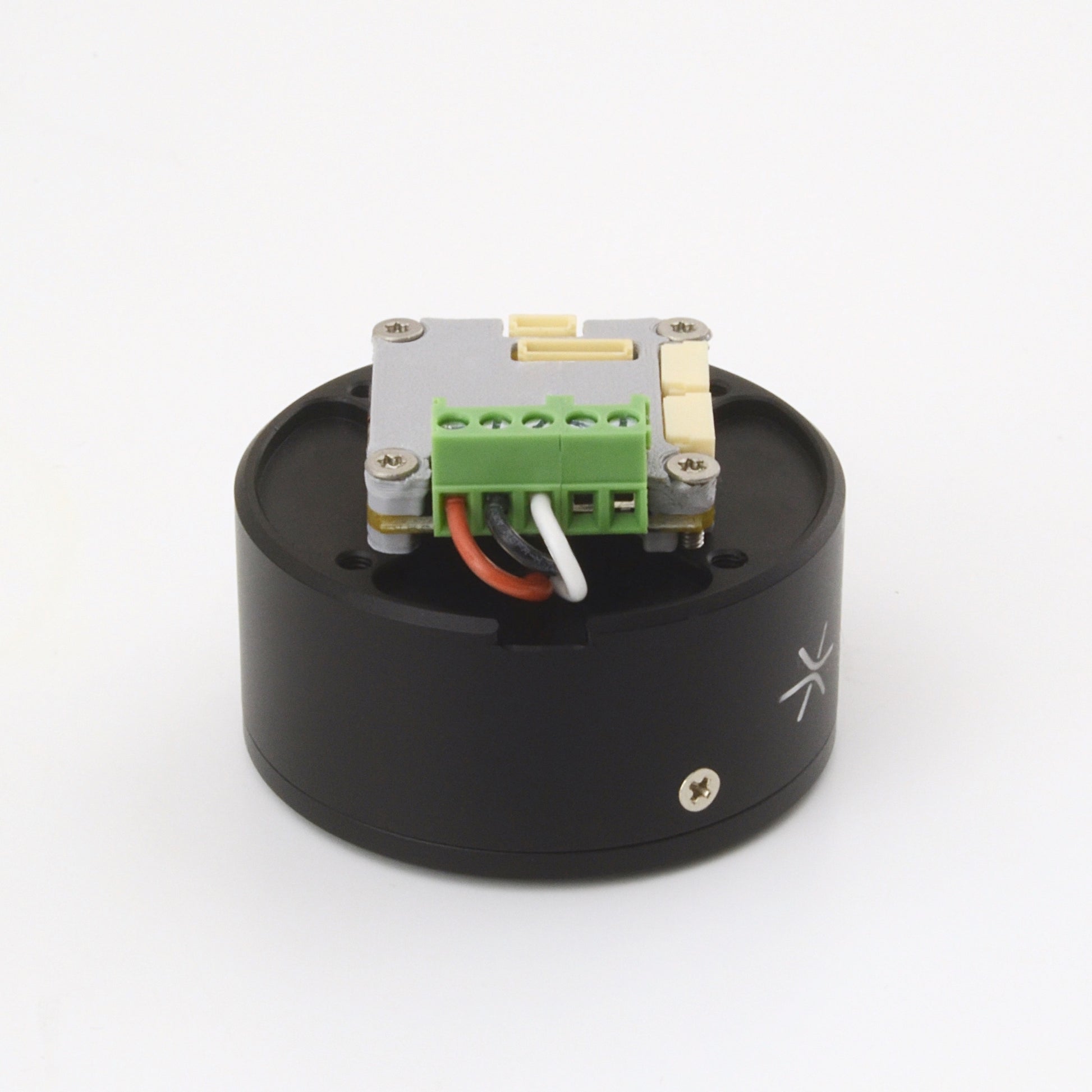
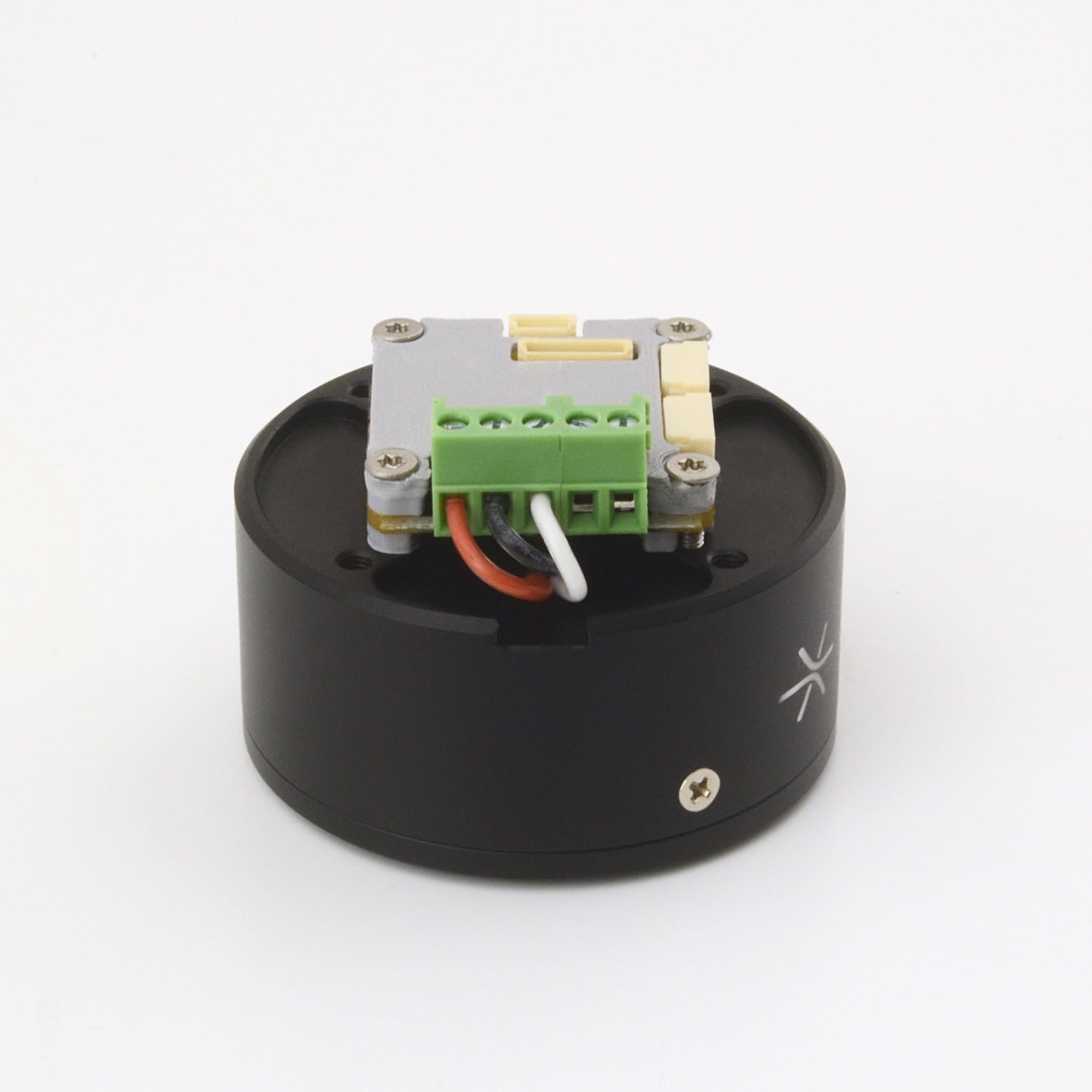
Axion is our new actuator for light robotic joints, combining a Tinymovr M5 with a GIM4305 motor and 10:1 reducer combo. Axion has everything you need to build a robotic joint. The actuator is lightweight offering a high torque density of 20Nm/kg and high torque transparency.
We suggest the CANine CAN Bus to USB Type C Adapter together with Axion.
In the box
- Axion Actuator
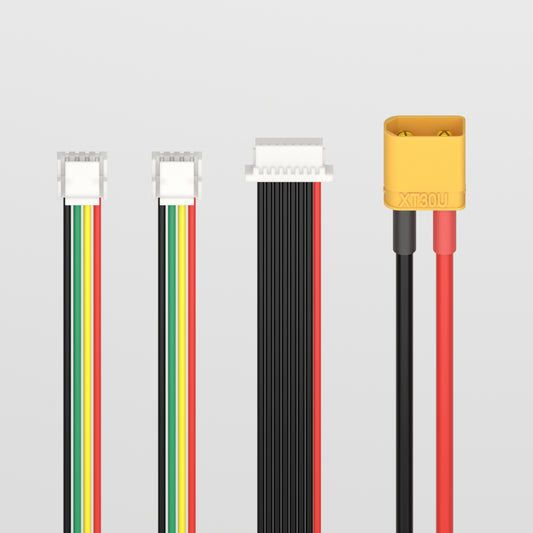
- 1x JST-GH 4-pin signal wire
- 1x JST-SH 8-pin signal wire
Specs Summary
Specs Summary
Input voltage range: 12.0–38.0V
Max Phase Current: 8.0 A
Connectivity: CAN Bus, UART, and SPI
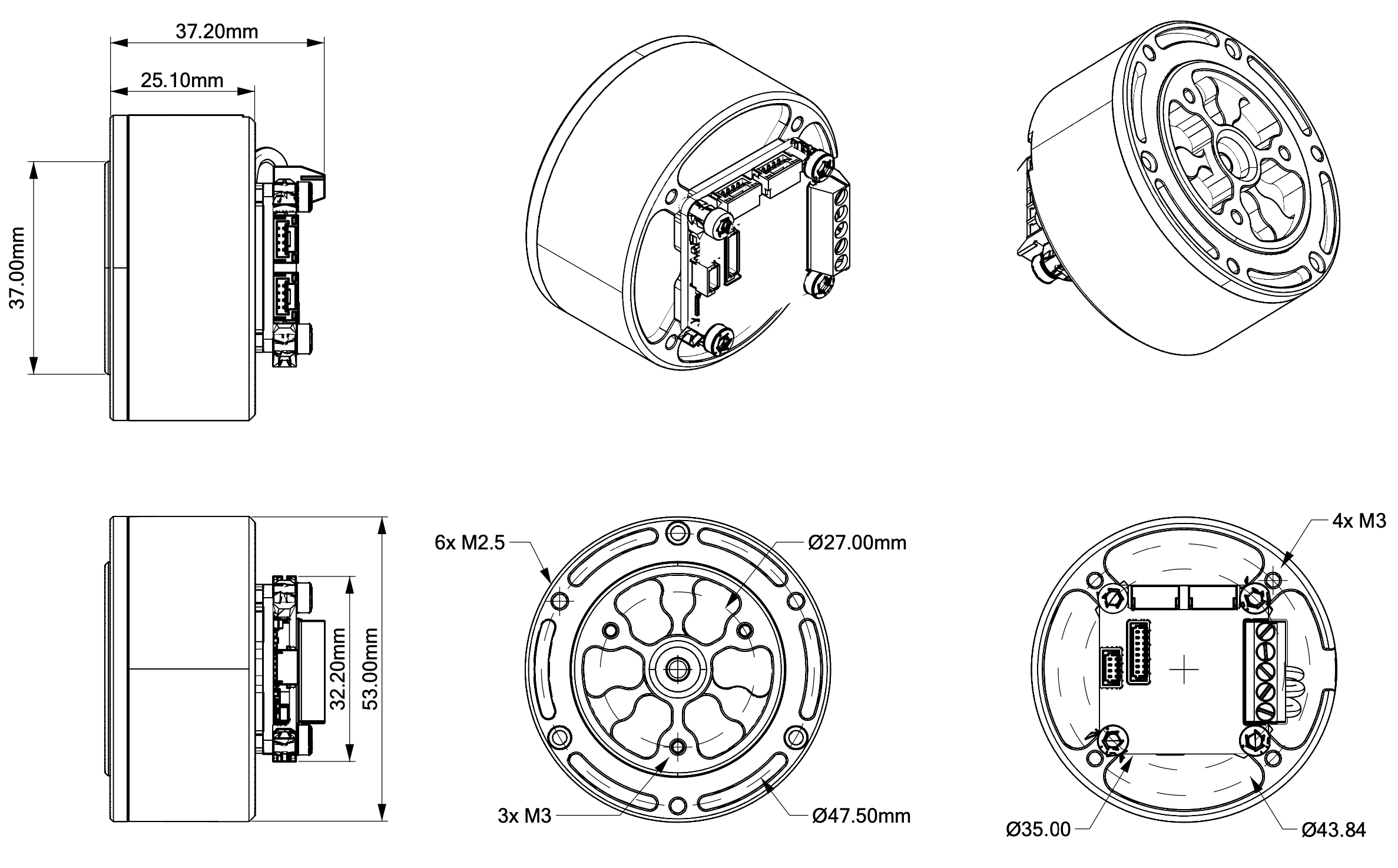
PCB Dimensions: x
Weight:
In the box
In the box
Axion R1
JST-GH 4-pin 300mm wire
Essential accessories
Essential accessories




Specs
-
• Continuous Torque: 1Nm
• Peak Torque: 3Nm
• Max Torque Density: 20Nm/kg
Input Voltage: 12.0–38.0V
• Max Phase Current: 8.0 A
• Max Continuous Power: 50W
• Reducer: 10:1 Planetary
• Reducer Backlash: 0.1°
-
• Idle power 0.5W
• Max Output Speed @24V: 320rpm
• CAN Bus interface 1Mbps with 2x JST-GH 4-pin sockets for daisy-chaining
• UART interface + SPI interface with JST-SH 8-pin flex socket
-
• SWD interface with JST-SH 4-pin socket
• Dimensions: ⌀ x
• Weight:
• Fully End-of-Line tested
• Motor and Reducer Made in China
• Designed and Assembled in EU
Essential Accessories
-
CANine USB-C to CAN Adapter
Regular price From €39,50 EURRegular priceUnit price per -
JST-GH 4-pin Cable
Regular price From €1,50 EURRegular priceUnit price per -
Tinymovr M5 Series Wire Pack
Regular price €7,80 EURRegular priceUnit price per

Integrations
-
Python
Install packageTinymovr Studio is a high-level command line interface and Python library for rapid prototyping with Tinymovr
-

Arduino
Browse the repoArduino-compatible C++ library for controlling one or more Tinymovrs through CAN Bus
-

Robot Operating System
Browse the repoROS-compatible Hardware Interface for controlling multiple Tinymovr instances. Differential Bot demo included!


